

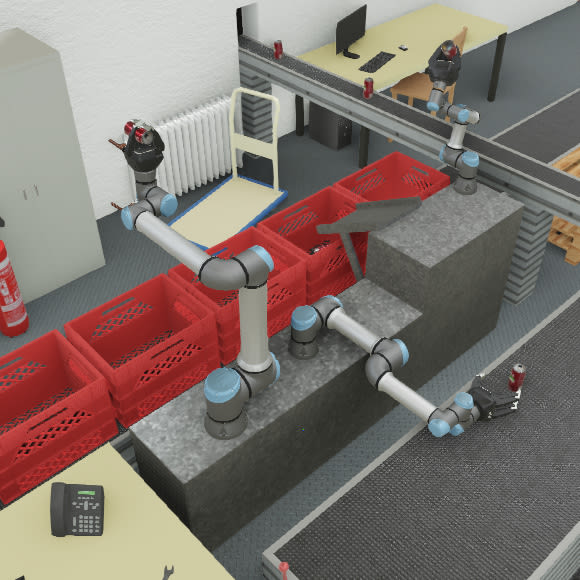



Webots is a free and open-source 3D robot simulator. It allows you to create 3D simulation models of robots interacting with their environment through sensors and actuators. Libraries of robots, sensors, actuators and objects are provided, but you can create your own. Collision detections, rigid body dynamics and fluid dynamics rely on a modified version of the ODE physics engine. The robot controller programs can be written outside of Webots in C, C++, Python, ROS, Java or MATLAB using a simple API. Webots features a 3D web interface allowing you to publish simulations online.
You are about to open
Do you wish to proceed?
Thank you for your report. Information you provided will help us investigate further.
There was an error while sending your report. Please try again later.
Snaps are applications packaged with all their dependencies to run on all popular Linux distributions from a single build. They update automatically and roll back gracefully.
Snaps are discoverable and installable from the Snap Store, an app store with an audience of millions.
Snap is available for CentOS 7.6+, and Red Hat Enterprise Linux 7.6+, from the Extra Packages for Enterprise Linux (EPEL) repository. The EPEL repository can be added to your system with the following command:
sudo yum install epel-release
Snap can now be installed as follows:
sudo yum install snapd
Once installed, the systemd unit that manages the main snap communication socket needs to be enabled:
sudo systemctl enable --now snapd.socket
To enable classic snap support, enter the following to create a symbolic link between /var/lib/snapd/snap and /snap:
sudo ln -s /var/lib/snapd/snap /snap
Either log out and back in again, or restart your system, to ensure snap’s paths are updated correctly.
To install Webots, simply use the following command:
sudo snap install webots
Browse and find snaps from the convenience of your desktop using the snap store snap.

Interested to find out more about snaps? Want to publish your own application? Visit snapcraft.io now.
