

Gazebo (formerly known as Ignition [1]) is an open source robotics simulator maintained by Open Robotics [2].
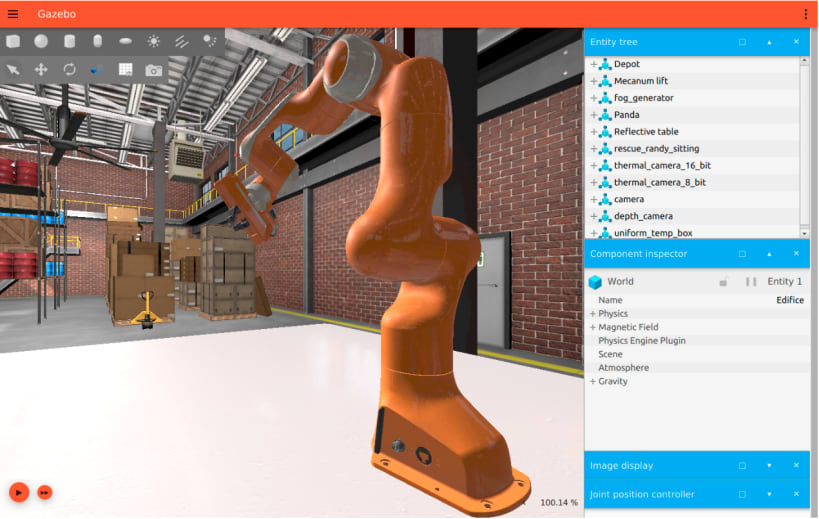
Through Gazebo, users have access to high fidelity physics, rendering, and sensor models. Additionally, users and developers have multiple points of entry to simulation, including a graphical user interface, plugins, and asynchronous message passing and services.
Gazebo brings a fresh approach to simulation with a complete toolbox of development libraries and cloud services to make simulation easy. Iterate fast on your new physical designs in realistic environments with high fidelity sensor streams. Test control strategies in safety, and take advantage of simulation in continuous integration tests.
Note: This is a beta release, do expect bugs and limitations. If you encounter any, please do report it [3].
Installation Instructions:
snap install gazebo --edge
gazebo.gz gazebo shapes.sdf
If you are following the Gazebo 'Getting Started' documentation, you can replace the entire 'Step 1: Install' with the snap command and resume at 'Step 2: Run'.
Learn more about Gazebo on the official website [4].
[1] https://community.gazebosim.org/t/a-new-era-for-gazebo/1356
You are about to open
Do you wish to proceed?
Thank you for your report. Information you provided will help us investigate further.
There was an error while sending your report. Please try again later.
Snaps are applications packaged with all their dependencies to run on all popular Linux distributions from a single build. They update automatically and roll back gracefully.
Snaps are discoverable and installable from the Snap Store, an app store with an audience of millions.
Snapd can be installed from Manjaro’s Add/Remove Software application (Pamac), found in the launch menu. From the application, search for snapd, select the result, and click Apply.
Alternatively, snapd can be installed from the command line:
sudo pacman -S snapd
Once installed, the systemd unit that manages the main snap communication socket needs to be enabled:
sudo systemctl enable --now snapd.socket
To enable classic snap support, enter the following to create a symbolic link between /var/lib/snapd/snap and /snap:
sudo ln -s /var/lib/snapd/snap /snap
Either log out and back in again, or restart your system, to ensure snap’s paths are updated correctly.
To install gazebo, simply use the following command:
sudo snap install gazebo
Browse and find snaps from the convenience of your desktop using the snap store snap.

Interested to find out more about snaps? Want to publish your own application? Visit snapcraft.io now.
